|
CAN(Controller Area Network)はECUなど多くの車載デバイス間で通信を行うためのライン構造(ラインにノードがぶらさがる形式)のネットワークで、クラウンクラスになると100個以上のデバイス(CPU)がノードとして繋がっているそうである。CANでは各ノードは平等なバスアクセスができ、優先順位を考慮したCSMA/CA方式で衝突回避を行う。通信はノードのIDを用いるメッセージ・アドレッシングを用いている。以下は通信フォーマットの例である。 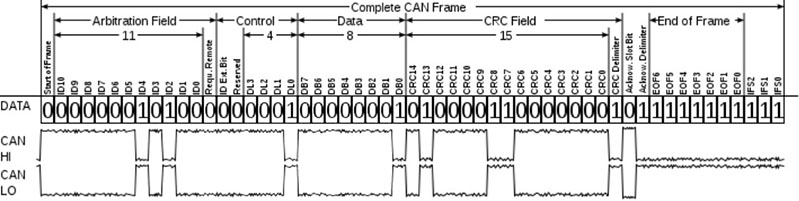 ウィキペディアより引用
| |||||||||||||||||||||||||||||||||||||



















|
CAN(Controller Area Network)はECUなど多くの車載デバイス間で通信を行うためのライン構造(ラインにノードがぶらさがる形式)のネットワークで、クラウンクラスになると100個以上のデバイス(CPU)がノードとして繋がっているそうである。CANでは各ノードは平等なバスアクセスができ、優先順位を考慮したCSMA/CA方式で衝突回避を行う。通信はノードのIDを用いるメッセージ・アドレッシングを用いている。以下は通信フォーマットの例である。 ウィキペディアより引用
| |||||||||||||||||||||||||||||||||||||